Paolo Stegagno's website

Mutual localization with anonymous measurements
In order to efficiently cooperate, the component of a multi-robot team must know each other's relative pose. Although many algorithms based on reciprocal measurments exist in order to solve this problem, most of them assume that those measurements comes with the identity of the measured robots. The problem becomes more difficult when this information can not be retrieved by the sensors, leading to a combinatorial data association problem.
Localization and control in heterogeneous systems
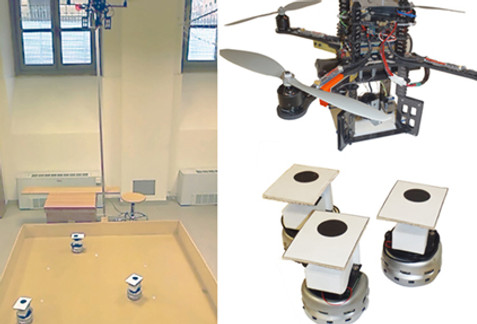
The development of a heterogeneous system including aerial and ground robots encompasses the solution of several problems. As a prerequisite, the relative localization of the component of the team must be known. Secondly, the robots must coordinate their actions in order to fulfill the desired tasks. The characteristics of the single components can be exploited in order to improve the performance. While the UAV's have a natural role as supervisors, the ground robots can act as "operative hands" of the system.
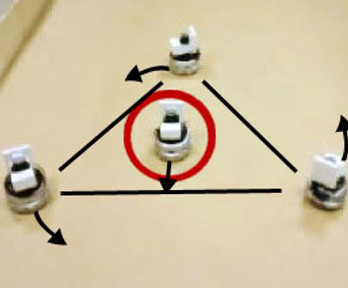
Encirclement
In order to efficiently cooperate, the component of a multi-robot team must know each other's relative pose. Although many algorithms based on reciprocal measurments exist in order to solve this problem, most of them assume that those measurements comes with the identity of the measured robots. The problem becomes more difficult when this information can not be retrieved by the sensors, leading to a combinatorial data association problem.